










Hệ thống xử lý wafer Robot chân không wafer - Robot RR481L200
.png)
Giá
- Xuất xứ
- Bảo hành
- Hình thức thanh toán
- Điều khoản giao hàng
- Điều khoản đóng gói
Thông số kỹ thuật chính của hệ thống xử lý wafer - Robot chân không wafer - Robot RR481L200
Kích thước nền
Lên đến 300mm wafer
Sức chứa
3.0kg / 10 Nm, Lưu ý: Đối với phần đính kèm cổ tay (bao gồm cả bộ phận đầu cuối)
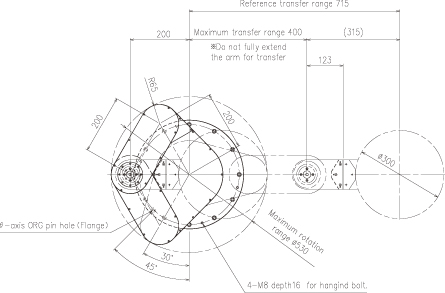
Khoảng cách chuyển của trung tâm chất nền
715mm (đối với wafer 300mm)
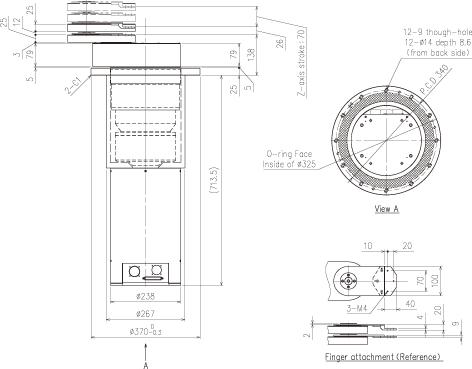
Hành trình trục Z
70mm / 140mm
Phạm vi xoay
Xoay không giới hạn
Đường kính quay
530mm
Độ chính xác chuyển (X, Y)
± 0,1mm
Khối lượng
100kg
Cấp độ chân không
10E-6 Pa
Tỷ lệ rò rỉ
5x10E-9 Pa.m3 / giây He (Chân không cơ sở 5x10E-4 Pa)
Nhiệt độ hoạt động
80oC trở xuống
Vật liệu sử dụng trong chân không
Alminum, Thép không gỉ, AM350 (Bellows), Nam châm với thông số mạ Ni, Vòng chữ O dựa trên Fluorine
Thông số kỹ thuật động cơ
Động cơ truyền động chân không trực tiếp (trục Z: Động cơ servo)
Thông số kỹ thuật của bộ mã hóa
ABS
Tiện ích
48V DC (ổ đĩa động cơ), 24 V DC (truyền thông)
Thông số kỹ thuật truyền thông
TCP / IP
Tùy chọn
Mặt dây chuyền dạy học, Bộ nguồn (đầu vào 200 V AC)
Kích thước sản phẩm (Thông số kỹ thuật tiêu chuẩn)
Tính năng sản phẩm
Robot chân không cánh tay RR481 / boomerang (tay đôi) thực hiện khả năng lặp lại định vị cao và hiệu suất phân vùng chân không có độ tin cậy cao bằng cách áp dụng DDM (động cơ truyền động trực tiếp chân không) cho phần ổ đĩa. Cơ chế cánh tay được điều khiển bởi đai thép thực hiện việc áp dụng đầu cuối dài ngay cả với diện tích quay nhỏ.
Diện tích quay nhỏ.
Long end-effector có sẵn cho tầm xa.
Có sẵn cho kích thước cửa hẹp (15mm).
Độ chính xác cao.
Có sẵn cho chân không siêu cao.
Thông lượng cao.
Có sẵn cho tùy chọn AWC (bù vị trí wafer).